|
| |||||||||

|
||
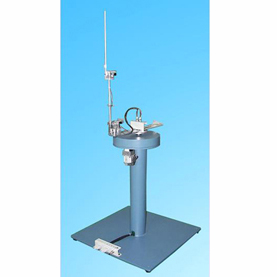
The circular double pendulum acrobatic robot is a new product of the inverted pendulum family. Based on the control of multiple-stage inverted pendulum swing up, the acrobatic robot controls the pendulum rod in different equilibrium status and interchange status so that the rod can erect when it is in motion. It can be applied in simulation of artificial intelligent control and other automatic control research and experiments.
The robotic system adopts a large base to enhance its stability. Planetary gear and belt pulley are used for deceleration. Noise is thus reduced when the system is in motion. The length of the arm is adjustable; the electrical system uses industrial standard AC servo drive system and encoder to ensure its reliability when it is in motion. The electrical wiring of the rotation part adopts slip ring connection. Besides Googoltech’s PC plug-in motion controller , MATLAB or C Language can be used as control module and thus facilitate users to carry out experiments and research works.
|
||