Click here to see the online version.
 |
Training on KALMAN Filter, and Beyond Understanding State Estimation Concept from Theoretical Equation to Application Codes Klang Valley, Malaysia |
||||
 |
 |
 |
 |
 |
|
{kind=link}
mathematical models to MATLAB M-codes implementation ..."
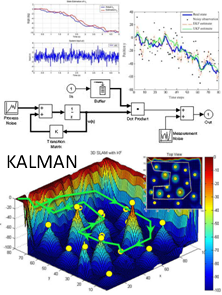
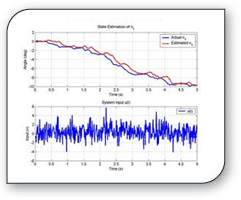
Target tracking is an important element for guidance, obstacle avoidance or surveillance systems, whose role and function is highly dependent on the position,
movement and the number of targets being tracked. The basic building block of a tracking systems is a filter for recursive target state estimation, KALMAN Filter, which is the best known filter algorithm being formulated more than 50 years ago. The KALMAN filter, named after Rudolf E. Kalman, is an optimal estimator for linear systems, but unfortunately very few systems in real world are linear.
|
 |
 |
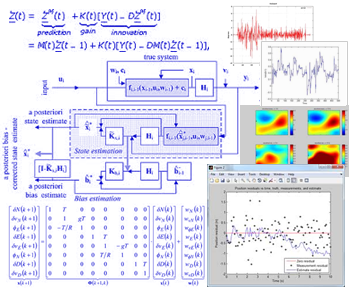
A common approach to overcome this problem is to linearize the system before using the KALMAN filter, resulting in the extended KALMAN filter. This linearization, however, is not without its problems. The development of better estimation algorithms for nonlinear systems has therefore attracted a great deal of interest in the research community, because improvements here will undoubtedly have great impact in a wide range of engineering fields. |
Course Methodology:
The course begins with an overview of the estimation problem, and a review on the basic concepts in state estimation. The KALMAN filter and its variants are then introduced in turn, each offering improvement / enhancement over its predecessor. The derivation of the main algorithms are covered, but kept to a minimum, to enable better
understanding and to provide insight on the conceptual ideas behind these
algorithms. Application examples are provided at the end of each section to help reconcile theory with actual
practice.
Prerequisites :
A basic knowledge of probability theory, signal processing and Octave/MATLAB programming is preferable.
Course Outline :
Introduction
• The estimation problem
• The state variable model
KALMAN Filter
• Conditional Mean
• State Estimate and State Predictor
• Minimum Mean Square Error
• Prediction and Update Steps
• Innovation, Recurrence Relations
• Application of KALMAN filter
Extended KALMAN Filter
• Non-linear State Variable Model
• Taylor Series Expansion
• Prediction and Update Steps
• Recurrence Relations
• Application Example
Unscented KALMAN Filter
• The Unscented Transform
• Sigma Points
• Prediction and update steps
• Recurrence Relations
• Example of Unscented KALMAN
Ensemble KALMAN Filter
• Ensemble Points
• Prediction of Error Statistics
• Analysis Scheme
• Example Application
Particle Filter
• Monte Carlo Integration
• Importance Sampling
• Sequential Importance Sampling
• Degeneracy Phenomenon
• Resampling
• Particle Filter Application
Summary
Who Should Attend
The primary target audiences for this course are
researchers, engineer, scientists, mathematicians and programmers at all levels who work with or need to learn about KALMAN filtering and/or state estimation. No background in either of these topics are, however, assumed. The detailed course material and many source code listings will be invaluable for both learning,
reference and implementation.
Note: Due to the nature of the course and the learning expectations, the availability seats are limited. You need to register early to obtain confirmation of your space.
Sign Up Now!
10 %
Early Registration Discount before 06 OCT 2017
10 % Group Discount for 3 or more from same organization
Venue : Klang Valley
Other upcoming courses to enrich and enhance your technical computing capability and data anaysls skill-set, Just click onto the Title to find out more details.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
For more information, please contact us at enquiry@solutions4u-asia.com
![]() :
:
The updates of our training program are sent to you, as we think that they might be of interest and benefit you. Please help to forward to others who may be interested. However, you may unsubscribe if you do not wish to receive further mailing from us. Thank you.