|
|||||||||
|
||
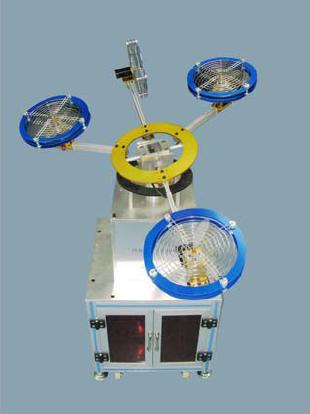
The four-rotor hover vehicle consists of motors with airscrews, encoders, drive modules, motion controllers and slip rings, etc. It is a highly coupled multiple degrees of freedom system. Different flight controls such as elevation and depression, inclination and hovering of the vehicle can be achieved. The system is suitable for undergraduates, postgraduates and control theory researchers to carry out verification and research of control theory such as optimal control, robust control, etc.
The four-rotor hover vehicle is powered by the 4 airscrews of the motors placed at the gumball shaft. The front, left and right motors drive the corresponding airscrews to fulfil the elevation and depression of the vehicle, the left and right motors drive the corresponding airscrews to overturn the vehicle, while the rear motor drives the corresponding airscrews to realize the navigation of the vehicle. The 3 encoders which are installed on the platform detect the different aviation statuses of the vehicle and form a closed loop system, thus fulfil precise positioning of the elevation and depression, tilting and hovering of the vehicle. Slip rings are installed in the base of the vehicle so that the wirings will not tangle up when the vehicles rotate freely. It also helps to reduce friction.
|
||